
Guía de Conexión Electrónica TurboBot: Arduino + Sensores + Motores
Esta guía te enseña cómo realizar únicamente las conexiones electrónicas de todos los componentes del carro robótico TurboBot.
El objetivo es que dejes todo el sistema cableado y listo para programar: motores, sensores, servos y cámara, sin entrar en la parte del código.
Está pensada para estudiantes, makers y entusiastas que quieren montar su TurboBot de forma ordenada, evitando errores comunes de conexión.
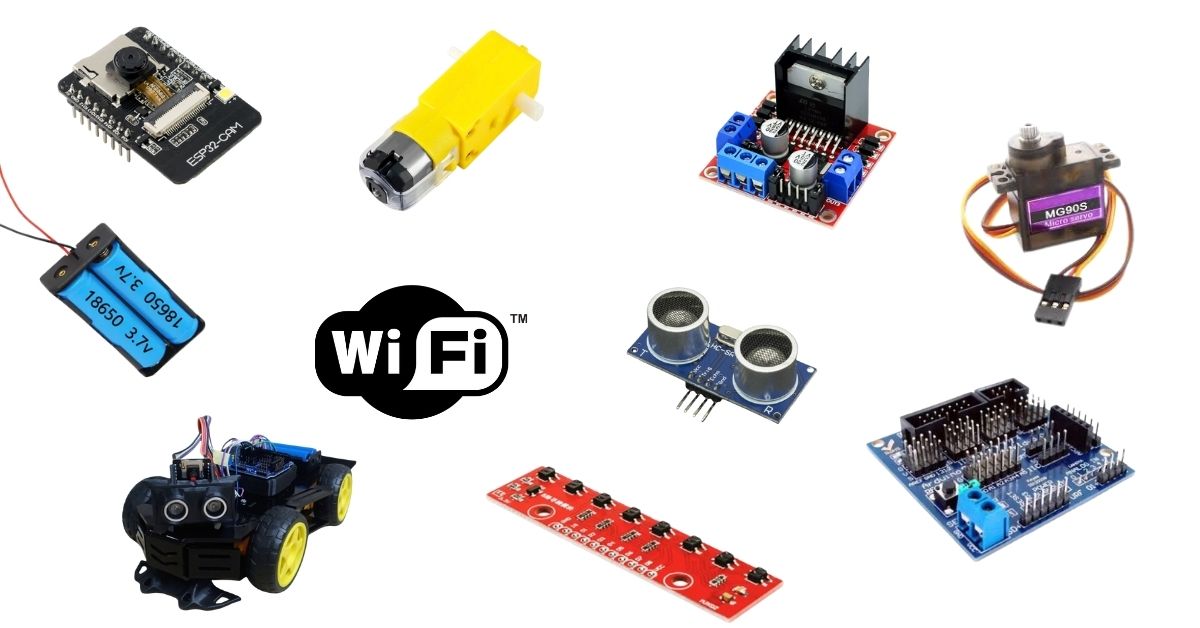
Componentes del TurboBot
- Chasis TurboBot con soporte para electrónica.
- 4 motorreductores TT (dos por cada lado).
- Puente H L298N (control de motores DC).
- Portabaterías 18650 (2 celdas de 3.7V en serie).
- Arduino UNO R3 con Sensor Shield V5.0.
- Sensor ultrasónico HC-SR04 montado sobre un servo MG90S (para girar de 0° a 180°).
- Cámara ESP32-CAM (visión Wi-Fi).
- Módulo QTR-8 (11 pines, sensor de seguimiento de línea).
- Cables jumper y tornillería para conexión.
Modulo Conexiones Basicas
Conexion motores
Módulos de Conexión del TurboBot
En esta sección vas a encontrar cómo se organiza toda la parte electrónica del TurboBot por módulos.
La idea es que entiendas cómo se alimenta, cómo se conectan los sensores y cómo se integra todo con el Arduino.
Cada módulo agrupa los componentes que trabajan juntos para que el carro funcione correctamente.
1. Módulo de Poderp
(Baterías – Sensor Shield – Puente H L298N)
Este módulo se encarga de distribuir la energía a todo el sistema.
Aquí se conectan las baterías al puente H, el puente H a los motores, y además se lleva energía al Arduino a través de la Sensor Shield.

T
2. Módulo de Cámara y Radar
(ESP32-CAM – HC-SR04 – Sensor Shield)
Este módulo combina visión y detección de obstáculos.
La cámara ESP32-CAM transmite video por Wi-Fi y el sensor ultrasónico HC-SR04, montado sobre un servo MG90S, permite escanear el entorno de 0° a 180°.
3. Módulo Seguidor de Línea
(Sensor QTR-8A – Sensor Shield)
Este módulo se encarga de leer la superficie del piso usando el QTR-8A.
Gracias a este sensor el TurboBot puede seguir líneas y detectar contrastes entre superficies para navegación autónoma.








Copyright 2026 © RoboticadeColombia.com
