El Brazo Robótico Kimo es un manipulador que contiene 6 servomotores sg90 o 6 servomotores mg90s, de tamaño educativo y de Código Abierto, manipulable con cualquier placa que maneje servomotores básicos.
Pasos a Seguir
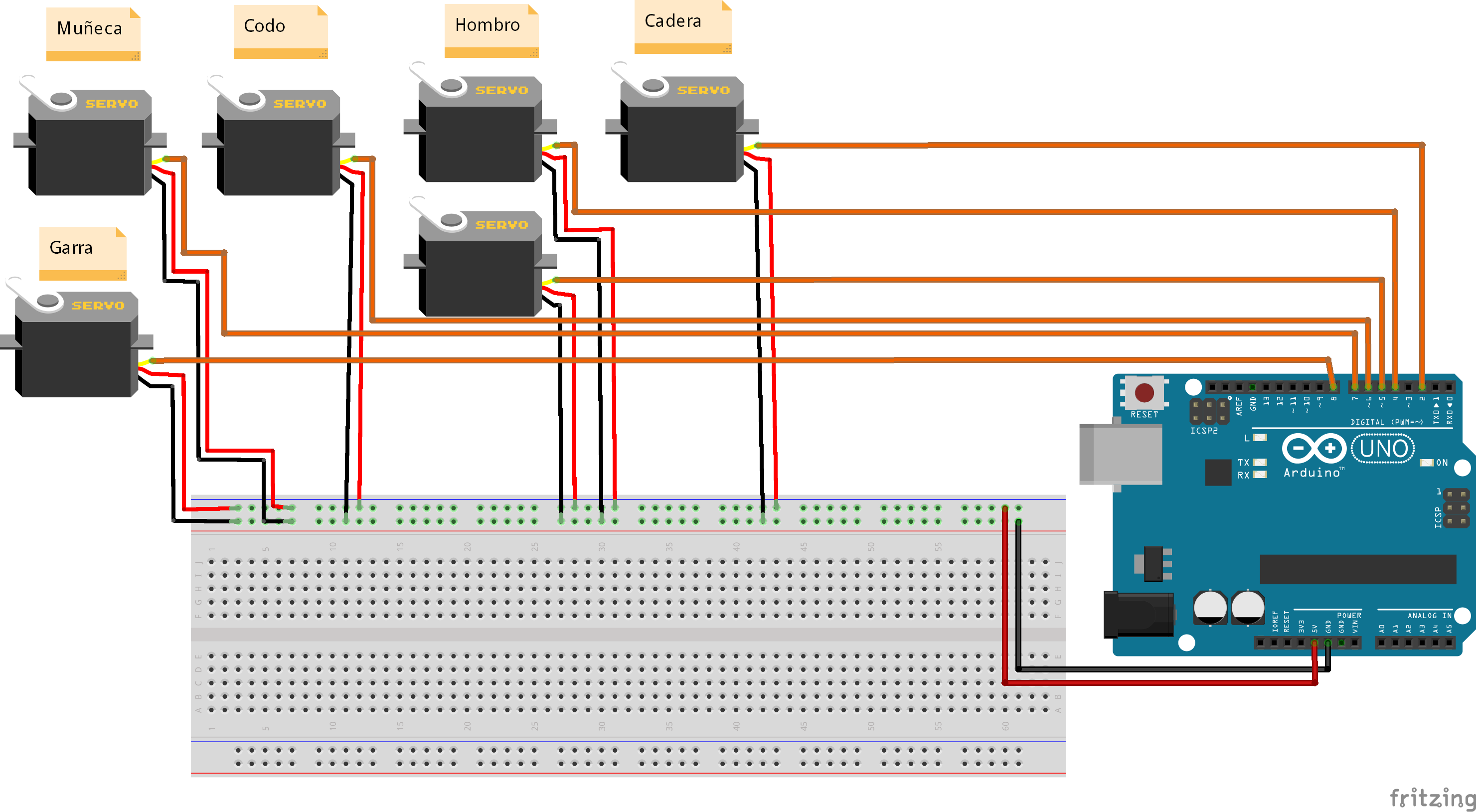
- Realizamos la siguiente conexión electrónica.
- Ahora cargaremos el siguiente código en arduino.
#include
Servo rotacion; Servo Hombro1; Servo Hombro2; Servo Codo; Servo muneca; Servo Garra; int angulorotacion=90; int angulohombro1=90; int angulohombro2=90; int angulocodo=90; int angulomuneca=90; int angulogarra=180; void setup(){ rotacion.attach(2); Hombro1.attach(4); Hombro2.attach(5); Codo.attach(6); muneca.attach(7); Garra.attach(8); Serial.begin(9600); } void loop(){ unsigned char comando=0; //Datos de 8 bits conteniendo un rango de 0 a 255 if(Serial.available()){//solo leeremos si hay un byte en el buffer comando=Serial.read();//leemos el byte if(comando=='a'){ angulorotacion+=30;//incrementamos 10 rotacion.write(angulorotacion); Serial.println(angulorotacion); } else if(comando=='s'){ angulorotacion-=30;//decrementamos 10 rotacion.write(angulorotacion); Serial.println(angulorotacion); } else if(comando=='e'){ angulohombro1+=30; angulohombro2-=30; Hombro1.write(angulohombro1); Hombro2.write(angulohombro2); Serial.println(angulohombro1); } else if(comando=='d'){ angulohombro1-=30; angulohombro2+=30; Hombro1.write(angulohombro1); Hombro2.write(angulohombro2); Serial.println(angulohombro1); } else if(comando=='r'){ angulocodo+=13; Codo.write(angulocodo); Serial.println(angulocodo); } else if(comando=='f'){ angulocodo-=13; Codo.write(angulocodo); Serial.println(angulocodo); } else if(comando=='t'){ angulomuneca+=20; muneca.write(angulomuneca); Serial.println(angulomuneca); } else if(comando=='g'){ angulomuneca-=20; muneca.write(angulomuneca); Serial.println(angulomuneca); } else if(comando=='z'){ angulogarra=110; Garra.write(angulogarra); Serial.println(angulogarra); } else if(comando=='x'){ angulogarra=180; Garra.write(angulogarra); Serial.println(angulogarra); } } }//End loop - Articulaciones Brazo Robótico.

